Traffic Analysis in the Original Traffic Video Dataset

Introduction
The rapid expansion of urban population as well as motor vehicles has created a variety of traffic issues. Intelligent transport technology (ITSs) are considered to be the best solution to these issues. Due to the advancement of Internet of Things (iot) technology, communication technology, and computer vision, surveillance of traffic is now a key technology of collecting traffic parameters and plays an important role. Traffic flow is a element of ITS, and quickly and accurately detecting and counting vehicles using traffic videos is a popular research subject. In the past few decades several vision techniques have been developed to count vehicles automatically in traffic video. A lot of the existing methods for counting vehicles are based on a vehicle detector in relation to the appearance of the car and other features. These are detected by foreground detection. Moreover, vehicles are counted according to the results of detection on vehicles. The methods to count vehicles that are based on Traffic Video Dataset of footage are divided into two parts that are vehicle detection and counting. For counting vehicles methods, the most common approaches are generally divided into two groups consisting of vehicle counting using the virtual detection zone and counting of vehicles based on tracking. Virtual detection creates virtual detection areas within videos to determine if there are any vehicles that are passing through in accordance with the changes in the grey value of the area that is highly effective however, it is prone to making mistakes due to lane shifting as well as parallel driving. Vehicle tracking determines the trajectory of every vehicle by comparing vehicles that are detected within each frames of video. It determines the amount of vehicles that are detected based on the trajectories of vehicles that have a high level of accuracy, however, the cost of computing is high.
With the advancement of deep learning objects detection and the ability to compute with hardware like GPUs It is now possible to create a deep-learning vehicle counting system with excellent accuracy and efficacy However, there are certain challenges. On one hand, it can be time-consuming to construct the training data for a specific traffic situation. The main challenge is creating an auto detection model that has excellent performance in a short time by transfer learning in absence of any training data. On the other hand while deep learning detection of vehicles is able to detect vehicles with greater accuracy however, it's still likely that instances of non-detection or false detection will occur. The prevention of errors caused by such situations is an essential issue to address to increase the accuracy of counting vehicles when the accuracy of the vehicle detection is hard to improve. In this article an advanced deep learning framework for counting vehicles is proposed. To address the issue of insufficient training data, a technique for the construction of a vehicle detection model that is based on transfer learning and open datasets is suggested to build an effective vehicle detection model with high-quality performance quickly in absence of any training data. In addition, to deal with the potential instances of missing detection or fake detections, a car counting method that combines the virtual detection zone and vehicle tracking is suggested, that can eliminate the mistakes that result from insufficient detection or false detection and increase the accuracy of counting vehicles.
Vehicle Detection
In the stage of vehicle detection the deep learning object detection technique is used. Particularly, to overcome the issue of not having enough training data transfer learning is employed to create a deep-learning model of vehicle detection. Utilizing a deep-learning detector model for objects as the base model and the vehicle data in open datasets for the training data and the model for vehicle detection is built through transfer learning.

1 Deep Learning Object Detection
In deep learning models for object detection that use a convolutional neural system (CNN) is utilized to discover image-related features, and then a classifier as well as a the regressor are utilized to identify and classify the features that were extracted. The models that are currently available are generally divided into two types which are one-stage and two-stage detectors. Two-stage detectors are comprised of regions proposal networks that feed proposals for regions into the regressor and classifier that have high recognition of objects and localisation accuracy, however their efficiency is not as high for instance in the R-CNN 29] Fast R-CNN 30] and Faster C-CNN 31]. 31[ 31]. One-stage detectors view the detection of objects as a regression issue that incorporates the entire image and feeds it to a classifier and the regressor, and then predicts objects directly , without the need for a region-proposal step. They therefore run faster than two-stage detectors like SSD as well as YOLO. In the process of counting vehicles accuracy and efficiency are equally important. So, a one-stage detection is a good choice for vehicle detection models design. It is a good example of one-stage detectors YOLO offers superior performance in terms of accuracy and efficiency over other detectors and the choice between accuracy and efficiency is able to be determined based on needs. Therefore, in this model, YOLO is selected as the base model for an automobile detection model.
2 Transfer Learning
Transfer learning is the process of obtaining the relevant knowledge from a variety of source tasks and then apply it to an objective task according to the representation of the transferred knowledge, transfer learning may be divided into 4 types:
1.) Transfer learning based on instances Certain elements of data in the source task may be reused and then merged with the data of the target task to build an appropriate model.
2.) Transfer learning based on parameters: Certain variables, parameters or hyperparameters of designs are shared among the origin and goal job to increase the efficiency of learning.
3) Feature-representation transfer learning: A good feature representation that reduces the difference between the source and target tasks is found and the knowledge used to transfer into the learned feature representation is encoded.
3. Transfer learning based on YOLO
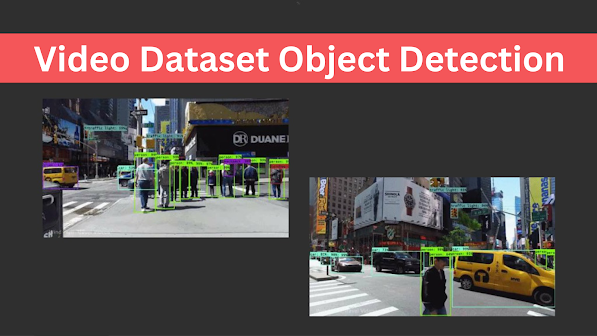
The traffic videos in this study are recorded by fixed cameras that are above straight roads, which include various lighting conditions, shooting routes, road conditions and resolutions. In these videos, cars or buses are visible and the numbers of each type of vehicle are recorded in isolation. When using deep learning for vehicle detection models the annotated vehicle data is required as a training data. GTS provides Dataset For Machine Learning contain vehicles annotated data. While they differ from traffic video vehicles and other traffic videos, they are able to be used to construct models for a specific target through transfer learning. But open datasets have some limitations when it comes to this endeavor because the majority of they are taken from the horizontal direction, and less are taken in the tilt downward direction at the top. Additionally, there will be certain annotation errors in images. Additionally, due to the differences between traffic videos and open datasets the model that is constructed that has high precision in open datasets may not be able to perform as well in traffic videos. This is why it is important to create a second dataset by labelling certain traffic scenarios images, then using them to train the model and as testing data to further enhance and test the effectiveness of the built car detection models.

Vehicle counting
In the stage of counting vehicles using bounding boxes for vehicles derived by vehicle detection, a brand new method of counting vehicles that combines the concept of virtual detection area with vehicle tracking is proposed that considers the possibility of false or missing detection, and combines the concepts of the conventional vehicle counting method that relies on virtual detection areas and tracking of vehicles.
1. Virtual Detection area and vehicle counting
With regard to the need for real-time vehicle counting, a method of counting using virtual detection areas is used as the basis method and improvements are also created for the input that is bounding boxes. The premise of the improved technique is that the procedure is in the following manner:
1.) Virtual detection zones are set for each lane in the road section of the video. To ensure that only one vehicle can pass through the detection zone at any given time and to ensure that the area is large enough, the detection zone must be limited. The length is roughly what is the width of a car as well as the width equal to the length that the road. In this scenario there is no multiple vehicles that passes through the detection zone simultaneously This can help reduce the amount of work involved in tracking and counting of vehicles.
2.) The location relationship between the detected vehicle's boundaries and detection area is determined frame-by-frame in turn, the condition of the area of detection is updated. If there isn't a any central location of the bounding area within the detection zone, the state of the area has "S" is 0 which indicates that there is no vehicle passing through. When there's a center point in the bounding box for the vehicle in the area of detection, the status of the area is changed by "S" 1 which indicates that one vehicle is that is passing through.
3.) Based on the status changes for each region in frames, the flow curve for each spot can be determined and the vehicle number can be determined. If the status of an area within one frame has the status of an area is =0 but then changes to an S =1 in subsequent frame then the vehicle number for the region is added to the number 1.
2. Two Missing Detection and false Detection
False detection or missing detection can occur during vehicle detectability in continuous sequences which can cause errors in counting vehicles. Two vehicles go in a virtual detection zone but the first one is deemed to be a different vehicle after it is detected following a missed detection in one or more frames. Therefore, the vehicle count error is made when the two cars are counted as three.
3. The Alarm Suppression Module based on the Vehicle Tracking
To find missing vehicles since vehicle tracking is able to identify the vehicle in question, an alarm suppression module that is based on vehicle tracking is included in the vehicle counting model. The module tracks the detected vehicles frame-by frame and determines if the passing vehicle is a new one to avoid counting mistakes due to a lack of detection. The procedure is like this:

2.) The vehicles in the following frame are identified and are matched to the tracking vehicle in the same area, based on the distance in space between the vehicles. In the event of a matching your tracking device is updated to match the found vehicle. If there isn't a match the vehicle detected is identified as a new vehicle for tracking in the same area.
3.) 2. Step 3 is performed frame-by-frame The vehicle number for every detection area is determined using the curve of flow. Additionally, in order to determine the exact number for every type of vehicle including bus, car and truck the flow curve of every type of vehicle is created in accordance with the type of discovered vehicles. Then each type of number is determined by comparing the type of flow curve.
4. Calculate the Vehicle's Number
The process of counting cars by fusing the virtual detection area with tracking of vehicles is as follows:
1.) The virtual detection zone settings According to the vehicle count task for lanes or road sections virtual detection zones are created within each section of road or lane.
2.) Identification of vehicles: Cars can be identified frame-by frame and the bounding boxes are considered to be the final result, which includes the classification, confidence of the detected as well as the center point coordinates, the width and the height. The suppression of alarms that are false In each detection zone in accordance with how big the bounding boxes, a bounding box will be categorized as fake detection, or otherwise not and if not, false detection is removed.
3.) Alarm suppression that is missing: In each area of detection that tracks vehicles in relation to the location of bounding boxes for vehicles is conducted on vehicles identified by the continuously frame sequencing in order to determine if the detected vehicle is a brand new vehicle. Calculation of vehicle numbers based upon the area of detection as well as vehicle tracking the flow curve for each vehicle type within the detection zone is examined to determine the car's number.

.png)

Comments
Post a Comment